



近年来由于网购等“无人经济”的快速增长,疫情催生的清洁消毒等业务场景的需求,都对重度依赖人力为主的物流、环卫体系提出了巨大挑战,高速发展的无人驾驶技术能为人们提供一个更经济、更高效、更安全的解决方案,而激光雷达是实现无人驾驶最重要、最核心的传感器之一。
目前无人驾驶小车的市场价格在30~50万元之间,这个价格对于运营商来说投入和产出不成正比,很难推动大规模商业化落地。根据权威机构调研报告,无人小车想要真正实现大规模商业化,成本需要控制在10万元以内。业内人士透露,在无人小车的成本结构中激光雷达、算法平台和底盘占比很高,这三部分也是目前降本工作的重心,而激光雷达又是重中之重。
以目前车顶360°主LiDAR+前向补盲LiDAR或者两侧角LiDAR的解决方案来说,总成本都在几万元,而且在两侧或者后向还存在盲区,显然在成本和实际应用上远不能满足要求。想要达到更经济更高效的360°环视+补盲全面覆盖,高性价比的LiDAR多点位分布式部署才是王道,是解决无人小车感知模块成本痛点的终级方案。
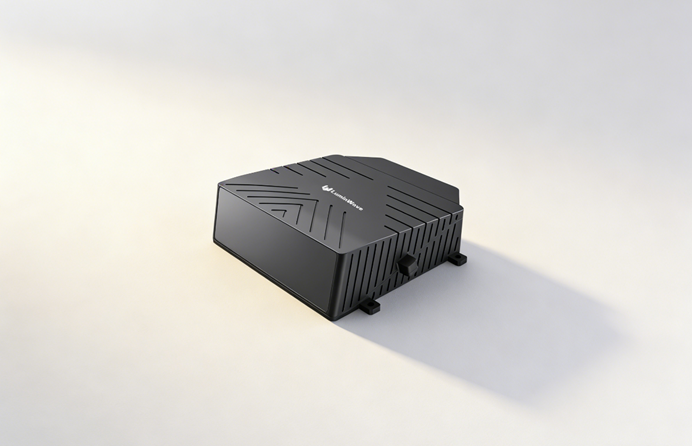
洛微科技针对此类场景开发了纯固态大视场近场激光雷达D系列(Diversity Series),该产品依托于自研的芯片级LuminScan™技术平台,实现固态扫描技术,拥有尺寸小巧、大视场角(FOV)、高性价比、高可靠性、高分辨率特点,目前已经实现量产,主要用于商用车、末端物流无人车和环卫消杀机器人的环视补盲和3D感知。

D系列图
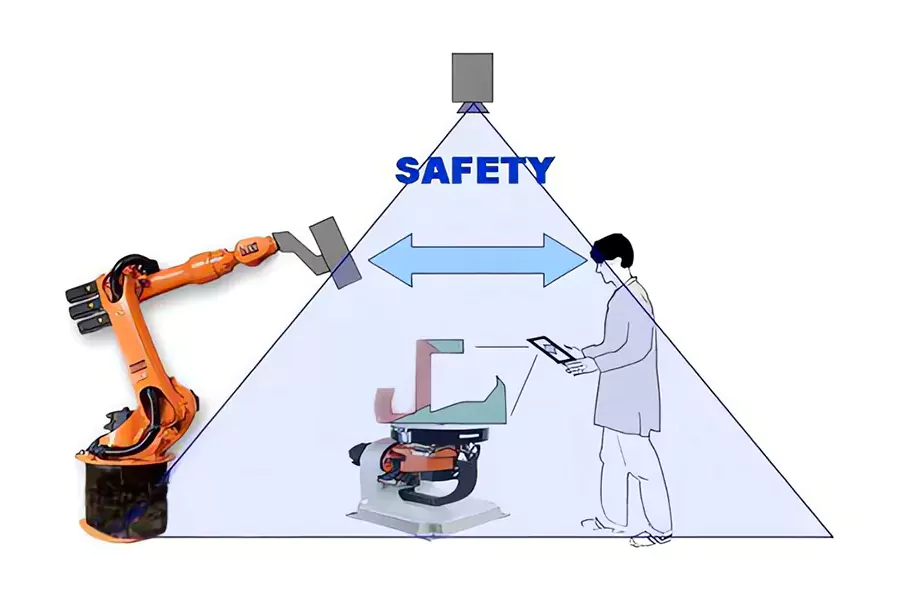
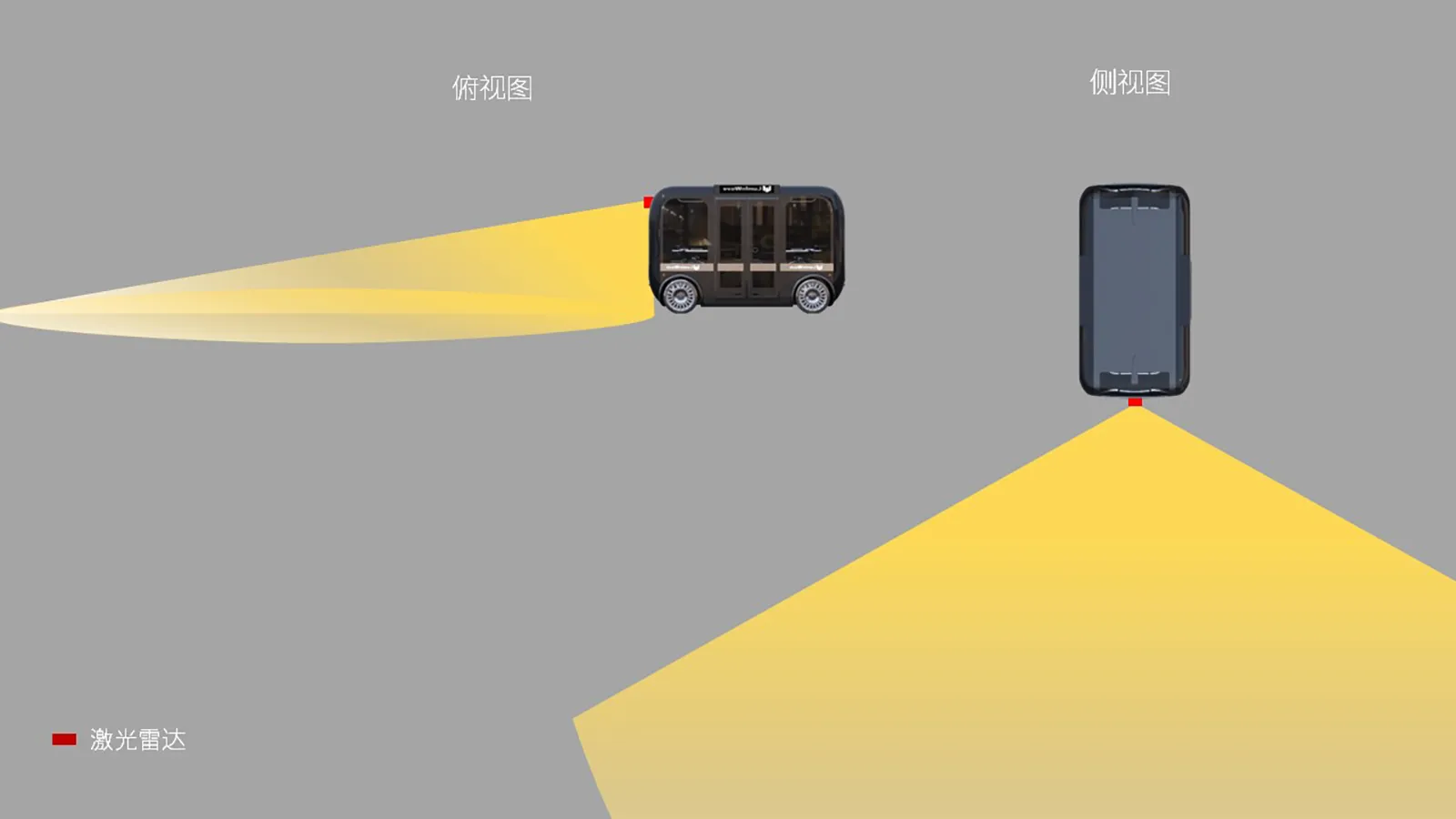
末端物流无人车和环卫消杀机器人都需要规划一定路线进行范围作业,同时还要注意碰撞、人员安全等问题。在前向的感知中需要搭载1~3个LiDAR进行探测补盲,洛微科技的激光雷达D系列水平视场角达120°,由于尺寸小巧,可在车头两侧灵活布局,用更经济的方式实现水平180°或以上的盲区覆盖,为路线规划决策获得充足响应时间。车辆行进过程中,D系列通过向前120°FOV区域内不间断发射高频激光束,对前方环境及地表人工设施等相关数据进行采集,产生的高密度点云可构建出高分辨率的接近实际环境的三维模型,帮助末端物流无人车和环卫消杀机器人对这些进行语义识别,分割地面与车辆行人树木等信息,规划更高效的作业路线。通过移动物体在点云图上不同的呈现,D系列可有效识别30米内人员位置及他们的移动方向,从而及时避让、重新规划线路,增强行车安全。

前向安装示意图
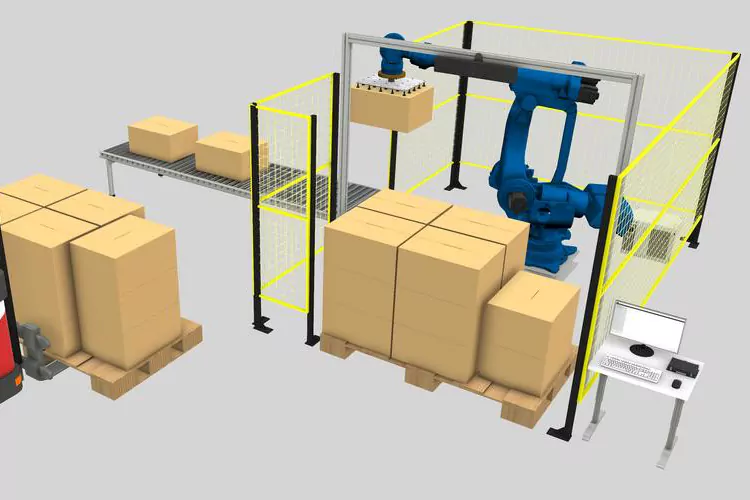
末端物流车和环卫消杀机器人在掉头和倒车时由于后部区域视线受阻,需要在后部安装激光雷达传感器实现补盲、监控泊车路线的功能,洛微科技的D系列垂直视场角达90°,离地1米左右的装载高度可对低矮物体有效感知,覆盖后方30米内从地面到与水平高度的扫描面。当自动泊车遇到障碍物时,D系列可以灵活控制扫描光束,动态定义扫描感兴趣区域(ROI),减少光源功率的同时增加障碍物上的扫描频率和点云数据,使得障碍物能更快更准确被识别,自带的信号处理算法还可以预处理这些原始数据,去除无关信号的干扰,为末端物流无人车及消杀机器人聚类分析、特征提取提供依据,当执行下次任务时,遇到同类型障碍物能及时做出动态反应,更快执行避让操作,提高工作效率和安全性。
后部安装示意图
安全作业时,对末端物流无人车和环卫消杀机器人侧向信息的收集也同样重要。安装在侧面的激光雷达D系列对马路边缘三维信息实时采集,扫描时角分辨率达0.3°,可以识别特别扁平、靠近地面的物体,即使是坡度很小上下坡路面,环卫消杀机器人也能始终沿路肩贴边行驶,遇到障碍物及时绕行。垂直向下扫描时,D系列可以覆盖车侧地面1米左右的范围,让清洁死角也能顾及到。遇到从侧面过来的人时,D系列能根据高分辨率的点云数据确定两者间距,协助末端物流无人车侧向停靠在离人们30~50cm的前方,方便人们寄取快递,也能为环卫消杀机器人选择暂停消杀或避让提供依据,直到人们离开设定的安全范围。
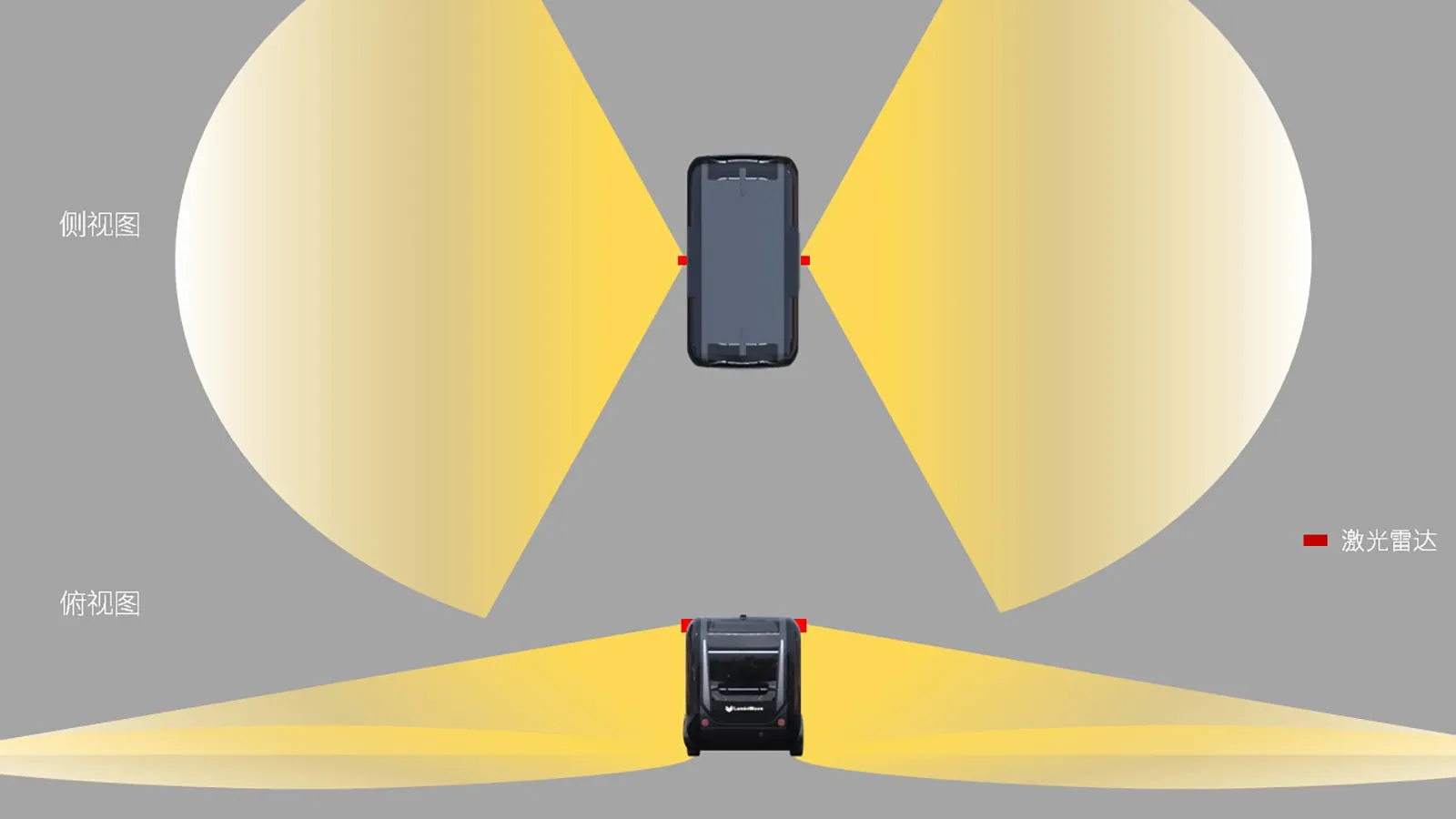
侧向安装示意图
洛微科技激光雷达D系列不管在光线过强或过暗的环境中都能稳定输出清晰的点云数据,完成3D测绘。纯固态的扫描方式更是提升了产品的可靠性和经济性,其较强的抗环境光干扰能力能广泛适应各类室内外工作环境。
洛微科技致力于为市场提供更有价值、更智能、可扩展、更经济的激光雷达产品,推动全球激光雷达和自动驾驶产业升级。