






激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,它可以提供目标物丰富精准的3D甚至4D数据,适应相对苛刻的环境和光照条件,能显著提升自动驾驶的可靠性,公认是L3级以上自动驾驶的必备传感器。
激光雷达种类繁多,分类的方式也各有不同,按测距原理可分为ToF和FMCW两种。ToF路线是比较传统且发展较早的技术,已被大家所熟知,而FMCW路线是近两年才发展起来,除了少数从业者,人们对此特性知之甚少,在这里我们就展开讲讲FMCW。
一般都认为FMCW路线的兴起跟硅光技术的发展密不可分,但并不是说在硅光技术成熟之前就没人做FMCW,早期的FMCW激光雷达都是由各种分立器件堆叠起来,组件调试和器件成本都非常高,很难达到大规模商业化落地需求。但随着硅半导体产业的成熟,基于硅CMOS半导体生态发展起来的硅光技术平台,可以把这些分立的器件集成到同一块芯片上,甚至理想状态下在FMCW中能将光学镜头和扫描部件芯片化,保障性能的同时大大降低成本。
那么FMCW是什么呢?
FMCW(全称 Frequency Modulated Continuous Wave,即调频连续波相干探测),它的测距原理是通过发送和接收连续激光束,利用混频探测测量两者的频率差异,换算出目标物的距离。具体来说就是把发射的光留一小部分在原地作为本振光,大部分作为探测的光源输出,光是有一定频率的,碰到目标物反射后频率也随之改变,这时将本振光和回到探测器的反射光进行相干混频,通过一段时间的数据采集,通过傅里叶变换得到两者频率差的峰值,计算出目标物的距离。
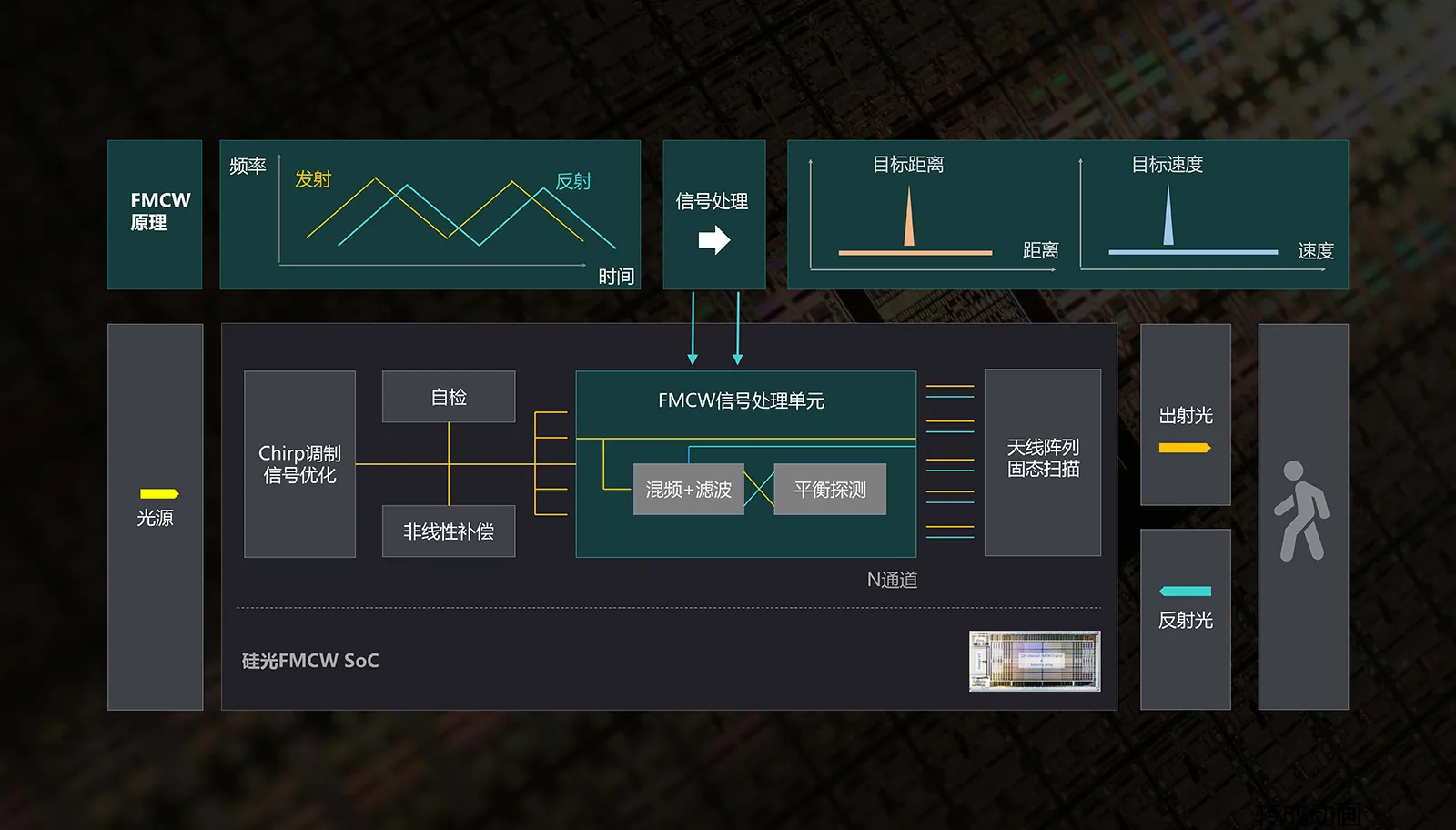
FMCW原理
FMCW抗互扰能力特别强
相干探测技术可以通过本振光放大信号,同时将微弱的回波信号放大,这个放大倍数是非常高的,1mW的光信号进去能放大到1pW,这个放大是相乘的关系,因为整个放大信号是距离的1次方成反比,动态范围非常大,放大后的信号处理起来就非常方便。而且,FMCW利用的是一个很窄频的激光器,频率在100kHz量级,相当于要在百万分之一纳米这么窄的一个光谱上跟自己做混频,其他跟这个频率不吻合的信号都会过滤掉,同频的情况只会发生在百万分之一纳米的范围内,在今后多数设备都搭载激光雷达的状态下互扰的概率就非常低。
FMCW抗环境光、日光干扰的能力也很强
虽然阳光是广谱的光,但FMCW只会接收自己发出去频率相同或相近的光,内置的光源强度要比反射进来的阳光强度至少高三个数量级,其带宽也比一般的滤波片窄好几个量级,基本在0.01纳米之内,因此FMCW可以对着太阳照也不会饱和,在室外复杂光照环境下优势非常明显。
FMCW能直接测速
FMCW主要利用反射光和本振光的频率差来测量目标物的距离,如果有多个物体,还可以读到多个峰值,意味着可以测量多个目标物的距离。此外FMCW的多普勒效应可以直接获得准确的速度信息,在很多极端情况下如人与车相距比较近、有车加塞时,就能清晰区分人与车,瞬间判断加塞车辆是远离还是靠近。FMCW可以轻松获取目标物上每个像素点的速度维数据,占用数据量又非常少,有效延长探测距离外又减少了后端算力的要求。
因此FMCW路线的优势非常明显,抗互扰能力强,几乎免疫日光等环境光干扰,信噪比高,能实时测速、具有高度集成性。
洛微科技从一开始就聚焦于FMCW路线,核心团队在硅光技术方面积累了多年的经验, 2021年发布的第二代FMCW光引擎模组就采用了这个设计。当光信号进入芯片后,先后进行性能检测、FM调频、非线性补偿等操作,将大部分光能量分配给天线阵列输出到场景中,余下的小部分光能量作为本振光,在FMCW信号处理单元中与被天线阵列接收到的场景反射光进行相干混合、平衡探测,最后转化为电信号,电信号进行补偿和傅里叶变换后,就能得到场景物体的真实距离和瞬时速度。
而且,洛微科技的硅光FMCW OE 2采用了多通道并行FMCW架构设计,并行的FMCW计算单元数达到128个,芯片上同时集成了多种关键的光信号处理单元,如信号光调频、非线性补偿、天线阵列等,在单个芯片上就集成了数以千计的光学器件,集收发为一体,是目前全球单颗芯片集成度最高的硅光芯片之一。
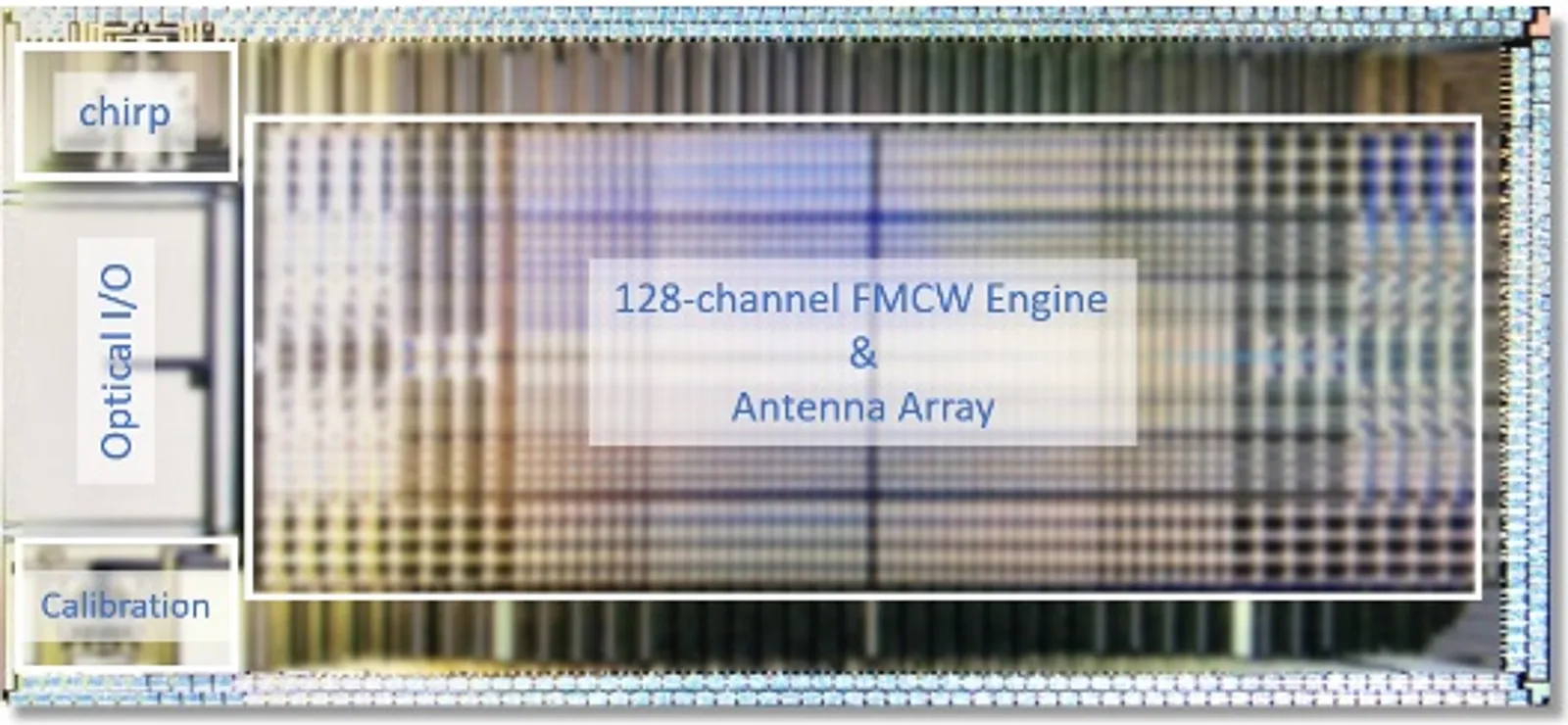
洛微科技FMCW芯片