车规级激光雷达,赋能高级辅助驾驶与自动驾驶
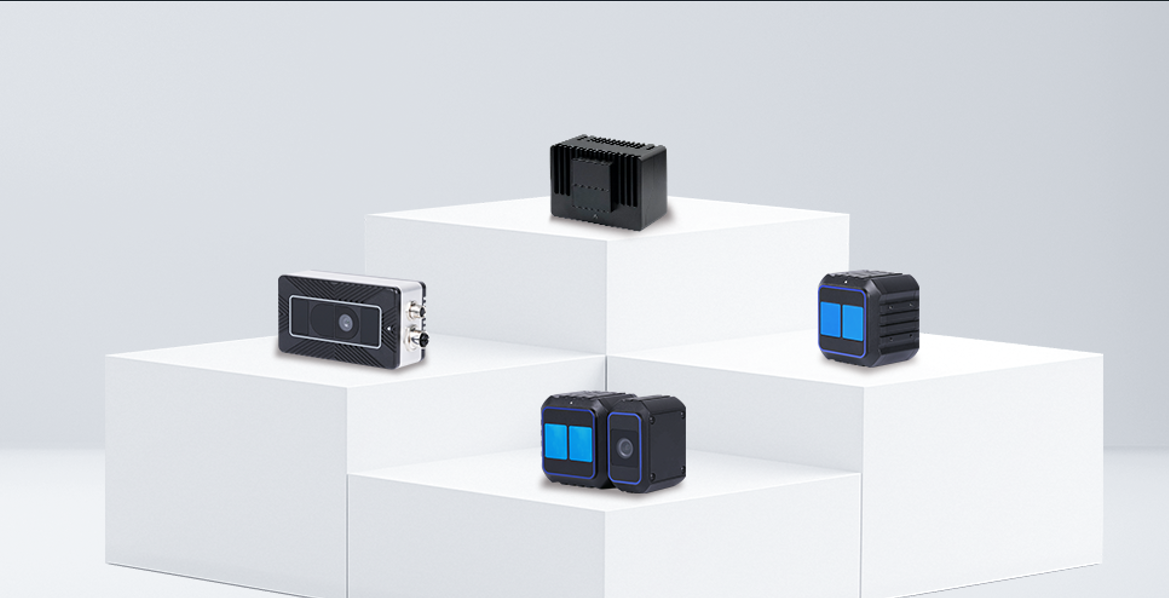
高性能纯固态面阵激光雷达
工业级高精度智能3D相机
工业级高精度3D相机标准版
工业级高精度RGBD 3D相机
工业级长距大角度3D相机
EN | 中
0571-85193787
填写表格以获取有关 LuminWave 的更多信息。
我们会尽快回复您。
联系电话:
我们的销售代表将及时回应并协助您。