
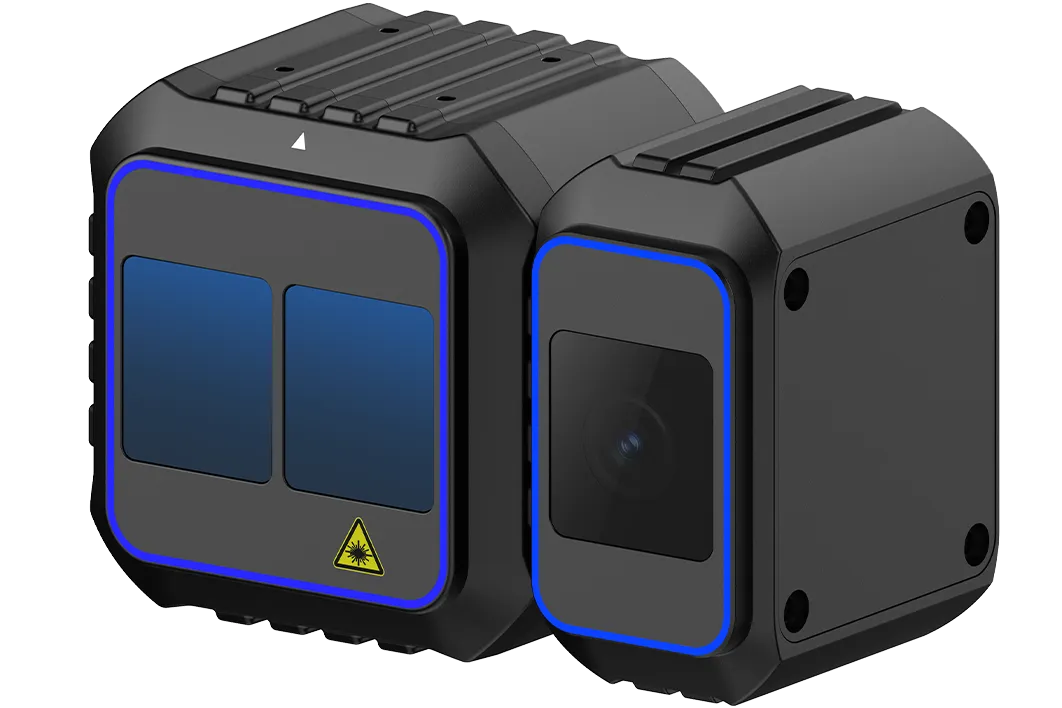
探测距离:0.4-5m
视场角(H*V):70°*50°
ToF分辨率:640*480 dpi
RGB分辨率:1600*1200 dpi
测距精度:<1% (@2m≤5mm)

兼容性:支持AI深度学习,支持
模型训练,能够有效识别纸箱、
麻包袋、金属棒等物体
快速部署:支持少量样品训练完
成新场景适配
轻开发:支持通用型算法,支持
灵活调用识别、定位等算法

系统:win10及以上
CPU:intel i5 8500
内存:8G以上
硬盘:256G高速固态
GPU: RTX3050




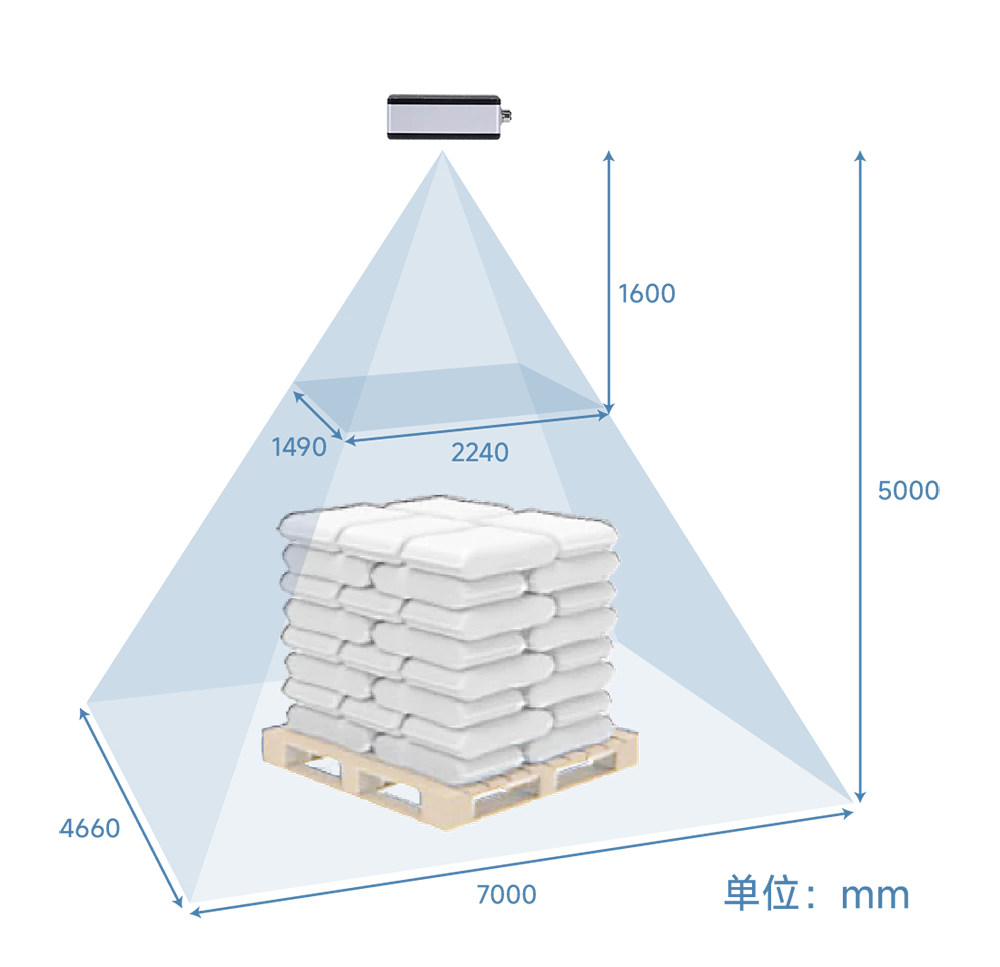
远距离大视野
宽广视角 (70°*50°),超大工作距离 (5m),轻松应对超高、超大垛型 (2m*2m*2.3m)

环境适应性
无惧环境光干扰,无惧工厂光照,保障作业稳定性和可靠性

方案灵活
可搭配各类不同品牌机器人(六轴、四轴、立柱),支持单/双工位灵活部署

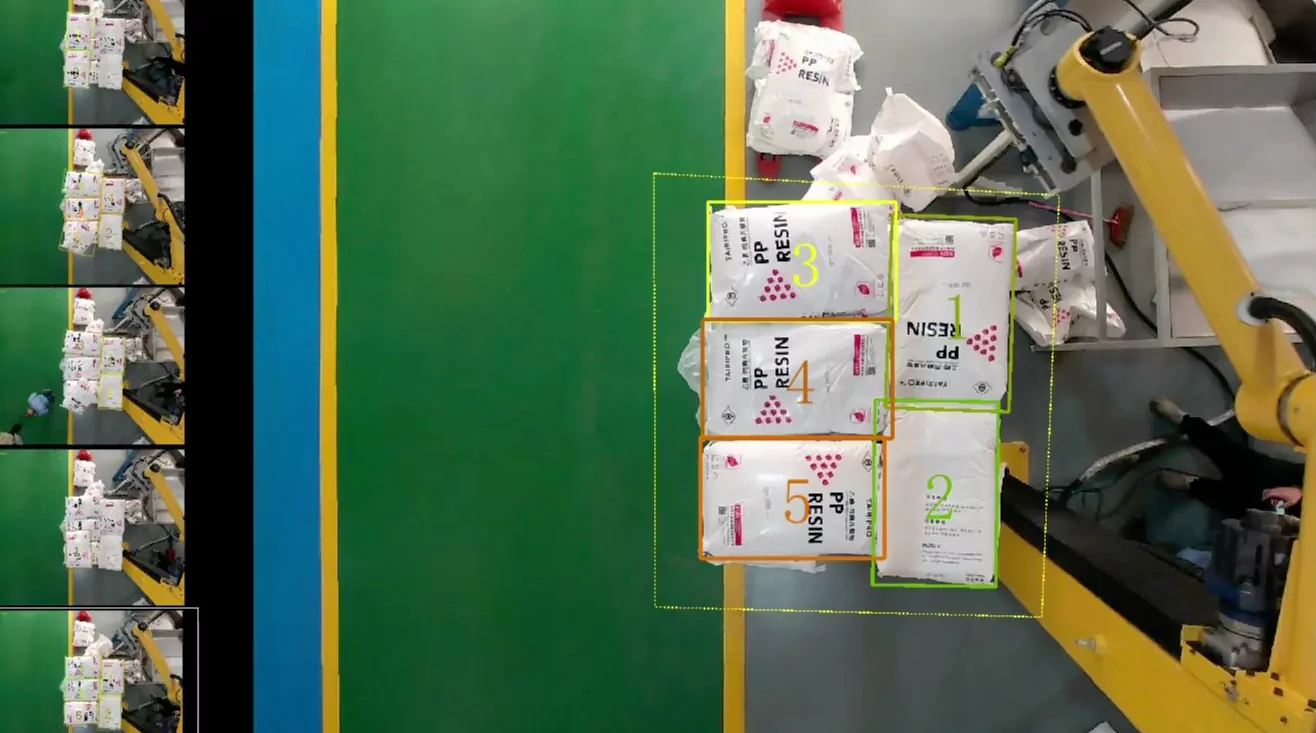
AI识别
新增物料免注册,支持纯色、复杂图案、形变、褶皱等各类软包识别,支持空托盘识别

垛型友好
适应六花垛、五花垛、回形垛等典型垛型