随着自动驾驶从L2向L3/L4级别迈进,激光雷达作为车辆感知系统的“眼睛”,正经历一场深刻的技术变革。在众多技术路线中,调频连续波(FMCW)激光雷达凭借其独特的相干探测原理和4D感知能力,正被越来越多的行业专家视为车载激光雷达的“终极形态”。本文将深入解析FMCW激光雷达的技术原理、核心优势、硅光技术的赋能作业以及行业应用挑战,帮助大家全面了解这款激光雷达。
1 传统ToF为何逐渐显现短板
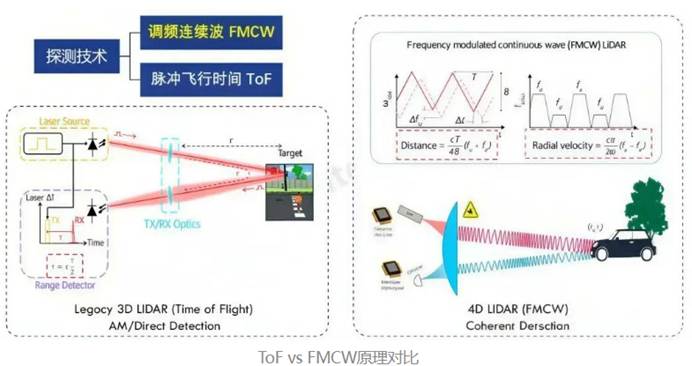
在自动驾驶、智能感知领域,激光雷达是实现环境探测的核心传感器。目前市面上主流分为两大技术路线:ToF飞行时间激光雷达与FMCW调频连续波激光雷达。
当下绝大多数量产车载激光雷达均采用ToF脉冲测距方案,技术成熟、整体成本偏低,广泛应用于L2级辅助驾驶市场。它的工作逻辑十分简单:设备发射短促的激光脉冲,激光接触障碍物后反射,雷达通过计算光脉冲往返的时间,结合光速测算出目标距离。
但随着自动驾驶向L3、L4高阶形态升级,ToF激光雷达的固有缺陷不断凸显,难以满足复杂路况下的安全感知需求:
- 无法直接测速:ToF仅能获取目标距离,想要判断物体移动速度,必须对比连续多帧数据做差分计算,高速行驶场景中实时性不足,容易引发判断延迟。
- 抗干扰能力薄弱:依靠光脉冲强度识别信号,强光、雨雪雾等恶劣天气,以及周边其他激光雷达的信号,都会形成噪声干扰,极端情况下甚至出现“致盲”现象。
- 多路径干扰明显:面对路面镜面反射、玻璃反光等场景,极易生成虚假目标点云,影响车辆决策判断。
在高阶自动驾驶对感知精度、实时性、稳定性提出更高要求的背景下,FMCW 激光雷达凭借颠覆性的技术原理,逐步成为行业重点攻关方向。
2 FMCW激光雷达核心原理:什么是4D相干感知
FMCW全称调频连续波(Frequency-Modulated Continuous-Wave),它彻底摒弃了脉冲发射模式,采用连续调频激光+相干干涉检测的工作机制,也是其性能全面超越ToF的核心原因。
FMCW激光雷达会持续发射一束频率随时间线性变化的连续激光,激光照射到道路车辆、行人、路障等目标后反射回设备内部。反射光会与雷达内部的本振激光发生干涉,结合多普勒频移效应,设备可同步解析出两大核心数据:一是根据频率差值计算目标距离,二是根据频移大小直接判定目标运动速度。
不同于ToF只能生成3D空间点云,FMCW激光雷达每一帧数据都能同步输出三维位置+实时速度,也就是行业内所说的4D点云。单帧即可完成目标测距、测速、轨迹预判,大幅提升自动驾驶系统的反应速度,这也是高阶自动驾驶青睐FMCW方案的关键原因。
为方便理解,我们通过表格直观对比两大主流激光雷达技术:
| 对比维度 | 脉冲 ToF 激光雷达 | FMCW 相干检测激光雷达 |
| 测距原理 | 激光飞行时间 | 调频干涉 + 多普勒频移 |
| 速度检测 | 间接测算(多帧差分) | 直接实时测速(单帧完成) |
| 抗环境干扰 | 弱,易受强光、杂光影响 | 强,相干检测仅响应特定频率信号 |
| 多路径干扰 | 易产生虚假目标 | 天然抑制鬼影、伪目标 |
| 核心光源 | 纳秒脉冲激光器 | 窄线宽连续波激光器 |
| 硬件形态 | 多带机械/运动部件 | 适配全固态芯片集成 |
| 综合成本 | 量产成本低 | 现阶段成本偏高,规模化后持续下降 |
3 硅光芯片:FMCW激光雷达落地的核心基石
FMCW激光雷达的商业化落地,离不开硅光芯片的深度赋能。硅光技术依托成熟的半导体 CMOS工艺,将光器件微型化、集成化,契合FMCW全固态、小型化、低成本的发展目标,二者属于相辅相成的黄金组合。
3.1 硅光芯片解决 FMCW 两大核心难题
光学相控阵(OPA)实现全固态光束扫描
传统机械激光雷达依靠电机、转镜等运动部件扫描光束,存在体积大、磨损快、可靠性差、寿命短等问题。而基于硅光技术打造的光学相控阵(OPA),可通过调节芯片上数百乃至数千个阵列单元的光相位,实现光束电子扫描,全程无任何机械运动部件。
OPA让FMCW激光雷达真正成为全固态雷达,设备体积大幅缩小、抗震动能力提升,同时光束切换速度可达微秒级,满足高速行车场景的扫描需求,目前4096阵元的OPA芯片已实现技术突破。
片上集成精简光路,缩小设备体积
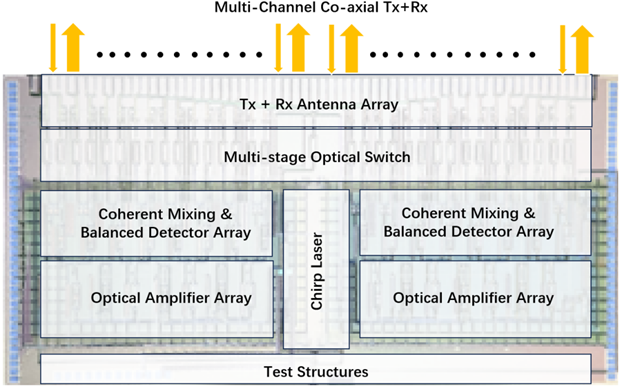
FMCW对光源要求极高,必须使用kHz量级窄线宽激光器,传统分立激光器体积庞大、布线复杂、成本高昂。借助硅光集成技术,可将窄线宽激光器、光调制器、光波导、光电探测器等核心光器件,集成在单颗硅光芯片之上。
当前行业主要采用三种集成路线:硅上异质外延、III-V 族材料异质键合、混合集成封装,其中混合集成封装技术最为成熟,也是现阶段商用产品的主流选择。芯片化之后,FMCW激光雷达摆脱了复杂分立光路,逐步走向“指甲盖大小”的微型化形态。
3.2 硅光芯片制造与 FMCW 的适配要求
硅光芯片基于SOI绝缘体上硅晶圆打造,沿用半导体CMOS制造工艺,但核心目标从“传输电子”变为“约束光子”,对工艺精度要求远超普通芯片。波导刻蚀精度、薄膜沉积均匀度、光纤耦合对准精度(亚微米级别),都会直接影响FMCW雷达的探测距离、损耗与稳定性。
值得一提的是,硅光芯片的封装环节是目前整个产业链的最大瓶颈。硅光波导宽度仅数百纳米,与9μm纤芯的单模光纤耦合难度极大,对准精度要求比普通电子封装严苛百倍以上,且封装测试成本占硅光芯片总成本的80%,也是FMCW 激光雷达降本的主要突破口。
4 FMCW激光雷达的行业挑战与发展现状
4.1 技术与成本挑战
尽管 FMCW 技术优势突出,但全面普及仍面临三大现实难题:
- 窄线宽激光器成本居高不下:适配FMCW的窄线宽激光器,价格是普通脉冲激光器的10-50倍,是整机成本偏高的首要原因。行业正通过芯片集成、规模化量产逐步摊薄成本。
- 异质集成技术尚未完全成熟:将III-V族激光器与硅光芯片高效集成是行业“圣杯难题”,目前多数方案的激光器线宽暂时无法稳定达到FMCW的严苛标准。
- OPA 相位校准难度大:OPA阵列单元易受温度、器件老化影响产生相位漂移,需要搭配复杂的实时校准算法,对芯片设计与算法能力提出双重考验。
4.2 全球企业布局态势
欧美地区是FMCW技术的发源地,在底层芯片、基础算法领域积累深厚。依托早期实验室技术成果孵化的企业,率先完成技术商业化验证,推出面向自动驾驶、工业视觉的全固态4D激光雷达产品,部分企业还深度绑定车载芯片平台,打造一体化感知解决方案。
国内市场呈现并跑发展的格局,依托完善的激光雷达、光电子产业链,本土企业快速切入FMCW赛道,形成差异化竞争优势。例如洛微科技发布全球首个单片全集成发射、接收和光路功能的硅光芯片,进一步推动激光雷达的轻量化、小型化和低成本目标实现。其推出的FMCW 4D激光雷达具备高信噪比、高置信度、实时多普勒速度以及抗环境光干扰等显著优势,可实时监测动态物体的速度和位置,为自动驾驶车辆提供更全面的环境感知,为乘用车、商用车、重卡、无人配送车等多种驾驶场景深度赋能。
5 应用场景与未来趋势
5.1 核心应用场景
高阶自动驾驶(L3/L4):这是FMCW激光雷达的核心主战场。4D点云+强抗干扰能力,可精准识别高速移动车辆、横穿行人,在强光、雨雾、城市复杂路况下稳定工作,大幅提升行车安全。
智能机器人与工业自动化:近距离高精度感知能力,适配服务机器人、工业巡检机器人、智能仓储设备,规避环境光干扰,实现精准避障与定位。
高端无人机:全固态小型化设计,降低机身负重,实时测速功能可保障无人机高速飞行、低空穿梭时的姿态稳定。
5.2 行业发展预判
短期内,ToF与FMCW两大路线将长期共存。ToF凭借低成本、成熟量产优势,继续主导L2级大众化辅助驾驶市场;FMCW聚焦L3及以上高阶自动驾驶、高端机器人等中高端场景,逐步渗透市场。
长期来看,随着硅光芯片封装技术突破、产业链国产化加速、激光器成本持续下降,芯片化、全固态FMCW激光雷达将成为主流。国内拥有完整的光模块、激光雷达、硅光产业链,在这场技术变革中具备弯道超车的潜力。
6 总结
从脉冲式ToF到相干式FMCW,激光雷达正在完成从“3D 测距”到“4D 全维度感知”的技术升级。硅光芯片是FMCW实现小型化、全固态、低成本量产的核心载体,二者的深度融合,重新定义了高阶自动驾驶感知的技术上限。
目前FMCW激光雷达虽受限于光源、集成、封装等难题,尚未全面普及,但它的性能优势不可替代。在全球自动驾驶产业快速发展的浪潮下,随着国内硅光产业链不断完善、本土企业持续技术攻关,FMCW激光雷达必将走进更多出行、智能装备场景,成为智慧交通与智能感知时代的核心硬件。
参考链接: