



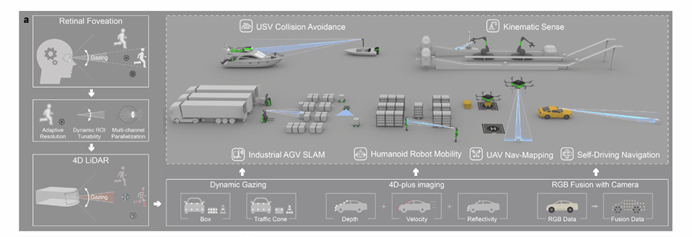
近日,北京大学王兴军教授-舒浩文研究员团队、香港城市大学王骋教授团队及上海交通大学周林杰教授团队在Nature Communications期刊在线发表题为“Integrated bionic LiDAR for adaptive 4D machine vision”的研究论文。该研究以人类视觉系统 “外围视野 + 凝视焦点” 的高效机制为灵感,创新性提出 “微并行” 架构,首次在芯片尺度上实现具备动态凝视能力的自适应并行 4D 成像 FMCW 激光雷达系统,破解了传统 FMCW LiDAR “分辨率 - 成本 - 功耗” 的三角矛盾,为自动驾驶、具身智能、低空智能系统等领域提供了 “看得广、看得清、看得快、看得全” 的革命性感知方案。
仿生灵感赋能,破解FMCW LiDAR 行业核心瓶颈
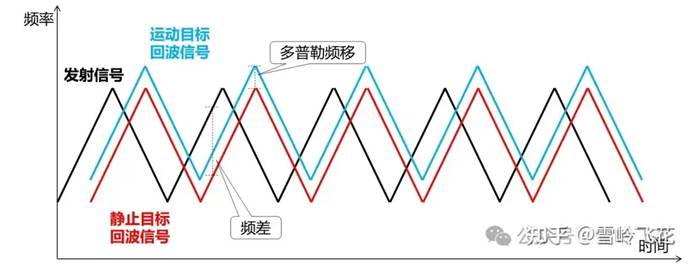
面向新兴智能场景,机器视觉正从 “能看见” 向 “高精度、低时延、多维度” 升级,但传统激光雷达的性能提升陷入两难困境,这一问题在 FMCW 激光雷达中尤为突出。作为主动式光学传感器的高端技术路线,FMCW LiDAR 具备高精度测距、强抗干扰能力,且能同步获取距离与速度等多维信息,但其相干链路对光源线宽、调频线性度与相位稳定性的严苛要求,使单通道链路复杂度与实现成本显著高于非相干方案。
传统提升 FMCW LiDAR 分辨率的方式,依赖 “堆通道、堆采样点频” 的空间堆叠式扩展,这导致光电器件数量、后端高速电子学带宽与采样处理需求同步激增,成本与功耗快速逼近工程边界,器件规模、封装堆叠与热管理等工程负担难以持续承受。
人类眼睛的进化智慧给出了破局方向 —— 不追求全视场均匀高分辨率,而是通过动态凝视将高采样密度集中于关键区域,以最优资源利用率实现精准感知。研究团队正是基于这一仿生逻辑,跳出 “空间通道堆叠” 的传统思路,构建了视网膜启发式芯片级 FMCW LiDAR 架构,通过波长 / 频域的可重构资源调度,让感知资源 “按需分配”,在大视场覆盖的同时,为关键区域提供超高分辨率成像,从本质上提升了 FMCW LiDAR 的感知效率与工程可行性。
三大核心技术突破,重新定义FMCW LiDAR 标准
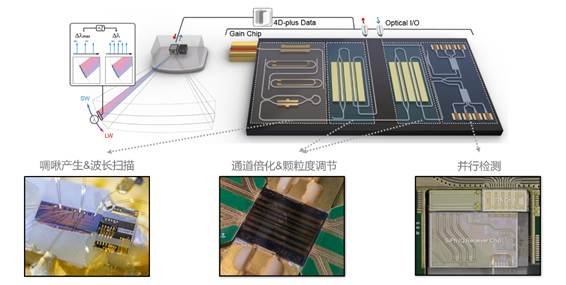
团队通过薄膜铌酸锂(TFLN)电光频梳与可宽谱调谐外腔激光器的协同创新,攻克了 FMCW LiDAR 高分辨率与低功耗、小型化难以兼顾的行业痛点,实现三大颠覆性突破:
突破 1:“凝视” 式自适应成像,FMCW 分辨率超越视网膜
这款仿生 FMCW LiDAR 通过外腔激光器实现大范围视点移动保障全局覆盖,再以电光频梳在目标区域按需提升采样密度,成功将局部感兴趣区域(ROI)的角分辨率提升至 0.012°,超越人类视网膜 0.017° 的成像标准,相当于传统 3D LiDAR 分辨率的 15 倍,刷新了 FMCW LiDAR 的分辨率上限。在模拟道路场景测试中,90% 探测点的精度优于 1.3cm,平均精度达 0.9cm,能清晰识别路牌数字等细微特征,完美实现 “看得广” 与 “看得清” 的协同优化,解决了传统 FMCW LiDAR “全视场均衡采样” 的资源浪费问题。
突破 2:“微并行” 架构,解放 FMCW 硬件约束
创新性提出的 “微并行” 架构,是 FMCW LiDAR 技术的关键革新。该架构将高分辨率能力从对空间通道密度的刚性依赖中解放出来,通过波长 / 频域的可重构资源调度,仅需 9 个物理通道即可等效实现 115 线扫描能力,与商用 LiDAR 性能相当,却大幅降低了 FMCW 系统的器件规模、封装复杂度与能耗。其宽光谱调谐范围超 100nm,通道间距可灵活调节,完美适配不同场景的感知需求,为 FMCW LiDAR 的小型化、低成本、低功耗部署扫清了障碍。
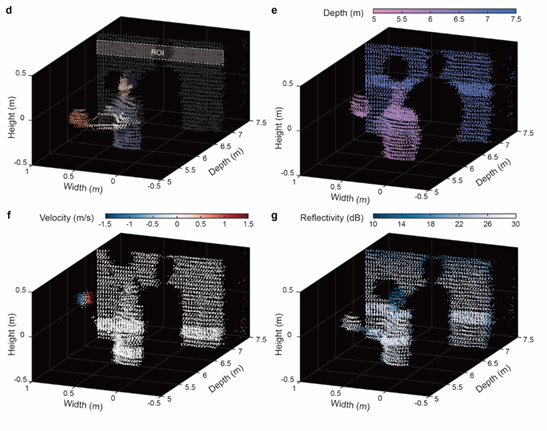
突破 3:4D-plus 多模态融合,升级 FMCW 场景表达
依托 FMCW 技术天然的多维信息获取优势,该系统不仅能同步采集三维空间 + 时间的 4D 核心数据(距离、速度、反射率),还通过与可见光相机的多模态融合实现点云上色,补足了传统 FMCW LiDAR 难以直接获取的颜色外观信息。在篮球投掷等动态场景测试中,这款 FMCW LiDAR 以 250Hz 扫描速率,实时捕捉目标的空间位置、旋转状态与表面纹理,速度测量精度达 7.81cm/s,测距精度达 1.65cm,形成更丰富的 4D-plus 场景表征,显著提升了智能体对复杂环境的可解释性与决策安全性,充分发挥了 FMCW 技术在动态感知中的独特优势。
全场景适配,赋能FMCW LiDAR 产业化新生态
凭借可重构、低功耗、高扩展性的核心优势,这款集成仿生 FMCW LiDAR 技术可广泛适配空天地多领域智能系统,推动 FMCW 技术从实验室走向规模化应用:
自动驾驶:在低能见度环境下精准识别障碍物、交通标志,动态聚焦危险区域,以 FMCW 的强抗干扰能力与高精度优势筑牢安全防线;
具身智能与机器人:实现复杂环境下的敏捷避障、精细抓取,适配仓储物流、应急救援等场景,满足设备对小型化、低功耗 FMCW 传感器的需求;
低空与海洋智能系统:为无人机(UAV)、无人船(USV)、自动驾驶地面车辆(AGV)提供轻量化、抗干扰的高精度 FMCW 感知方案,应对复杂工况挑战;
跨学科拓展:可迁移至光学通信、相干层析成像、高精度计量等领域,充分发挥 FMCW 技术在高频谱分辨率、高稳定性上的潜力,推动多学科技术迭代。
从模仿自然到超越自然,集成仿生 FMCW LiDAR 技术的突破,不仅是集成光子与机器视觉领域的里程碑,更将推动 FMCW 技术迈入规模化应用新阶段,为全球智能感知发展注入中国力量!