| 参数 |

 |
 |
|
|
| 工作原理 | TOF相机 | |||
| 传感器 | Sony DepthSense® TOF IMX570 | |||
| 激光器 | 940nm VCSEL*2 | |||
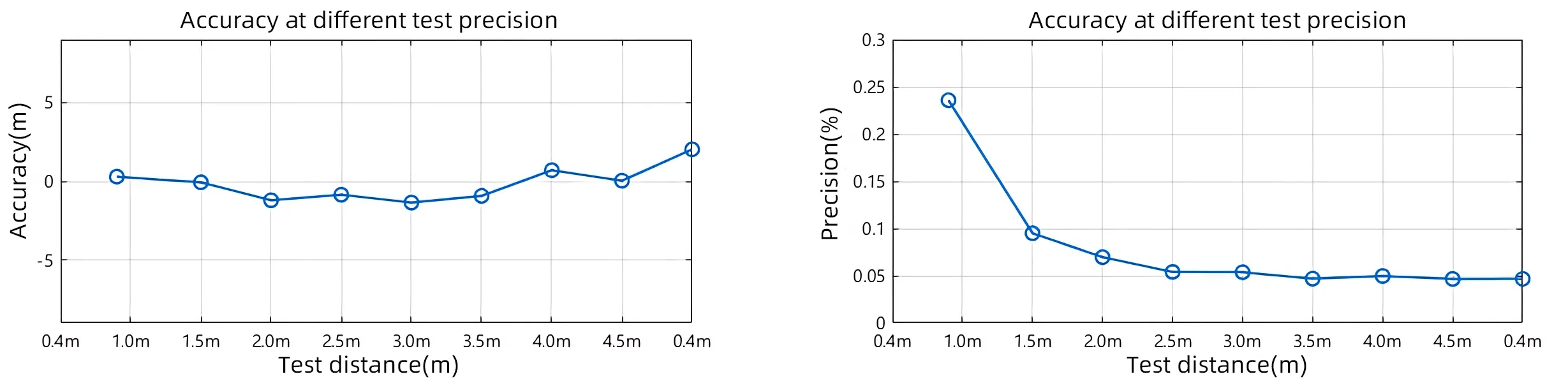
| 探测距离 | 0.4m~5m | |||
| 测距精度 | <1% (@2m ≤5mm) | |||
| 视场角(H x V) | 70° x 50° | 103° x 81° | ||
| 分辨率 | 640 x 480 pixel | |||
| 帧率 | Max.30 fps | |||
| 人眼安全 | Class 1 | |||
| 功能 | HDR功能 | 支持HDR功能 | ||
| 曝光时间 | 支持曝光时间调整 | |||
| 滤波器 | 支持多种滤波器设置 | |||
| 输出数据类型 | RAW12 (深度图、IR图、点云) | |||
| 供电 | 供电 | DC 12~24V | ||
| 功耗 | <10W | |||
| 网络接口 | RJ45千兆以太网口 | 航空插头:8 pin*M12 X-code | ||
| 电源接口 | 6.4mm电源接口 | 航空插头:8 pin*M12 A-code | ||
| 物理 | 尺寸( LxWxH ) | 76mm x 63.5mm x 76mm | ||
| 重量 | 385g | 411g | ||
| 工作温度 | -20° ~ 50℃ | |||
| 存储温度 | -30℃ ~ 70℃ | |||
| 防护等级 | IP42 | IP67 | ||
| 操作系统 | Windows 10及以上 / Linux | |||