



近日,洛微科技正式推出了其最新的3D视觉引导软包拆垛解决方案,该方案凭借高度的自动化和智能化水平,为水泥、化肥、食品、建筑等多个行业的货物转运和装车环节带来了革命性的改变。这一创新方案的发布,标志着洛微科技在物流与工业自动化领域迈出了坚实的一步。

在传统的拆垛方式中,人工操作或简单机械装置占据了主导地位,然而这些方式存在诸多局限性和缺点。人工拆垛效率低下,劳动强度大,且容易出现人为错误,导致破包、漏包等问题频发。随着生产和物流需求的快速变化,尤其是大规模、高频次的货物处理环节,传统方式已难以满足高效运作的需求。洛微科技正是基于这一背景,研发出了软包拆垛解决方案,旨在解决这些行业难题。
洛微科技的软包拆垛解决方案由3D相机、拆垛软件以及可选配的工控机组成,基于先进的3D视觉技术,能够适应各种不同类型、形状和尺寸的货物,无论是软袋还是麻袋,都能实现精准的识别和操作。同时,根据不同场景需要,我们也提供丰富的3D相机选型,包括LWP-D302C,LWP-D325C-I等,其中LWP-D325C-I可内嵌拆垛算法,大大降低了对CPU的依赖,并降低了SDK的开发成本。


方案流程
方案的工作流程也极为高效。当机械手或PLC触发拍照后,拆垛软件立即进行拍照并采集点云和RGB信息。随后,利用AI算法对目标进行识别,并根据3D信息计算识别目标的姿态。最后,根据特定规则进行排序筛选,输出最优抓取目标的姿态结果给机械手或PLC。整个过程快速而准确,确保了拆垛任务的高效完成。
方案优势
1. 高性能RGBD深度相机+智能算法
采用高性能RGBD深度相机与智能算法相结合,可同时捕捉垛型表面纹理信息和点云数据,并精准识别和定位软包、纸箱等不规则物体,确保每次抓取动作的稳定性和准确性,减少掉包和破包现象。
2. 支持算法内嵌,提升响应速度
软包拆垛算法运行于相机内部,实现实时数据处理,减少对外部工控机的依赖,降低总体成本,同时提升系统的响应速度。
3. 快速适应新增品规,轻松应对复杂任务场景
无需注册模型,可迅速实现对新增物体的准确识别,支持纯色、图案、形变、褶皱、斜放等复杂情况的软包。
4. 抗环境光干扰能力强,可用于半户外场景
系统采用940nm的激光光源,具备出色的抗环境光干扰能力,能够在复杂光照环境下保持稳定的视觉识别性能,无论是强光还是弱光条件,系统都能有效地捕捉到货物细节,确保拆垛任务的顺利执行。
5. 支持基于软包位置的抓取策略控制
通过获取每个软包的位置信息,提供合理的抓取顺序规划。即使面对复杂的堆叠形态,系统也能确保每个软包被高效、安全地处理。
6. 支持手眼标定,适应多垛型
系统支持手眼标定,用户可以快速完成机械臂和相机的坐标转换。同时,该系统能够适应复杂的堆垛结构,如六花垛、五花垛及回形垛,灵活应对不规则的堆叠方式,提升拆垛效率。


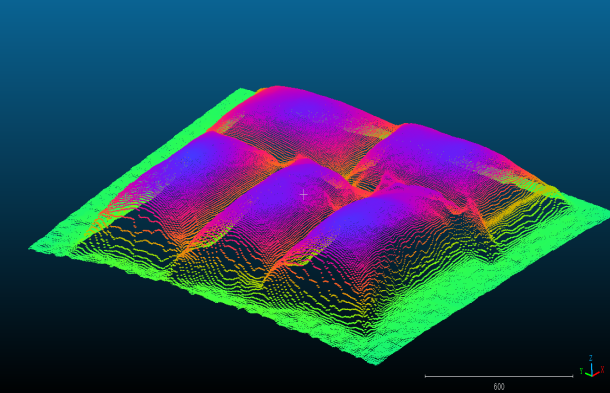
图|五花垛3D相机实拍效果图
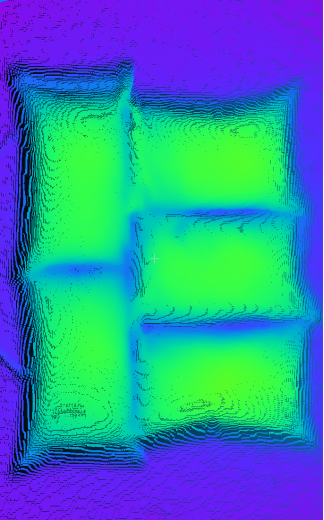
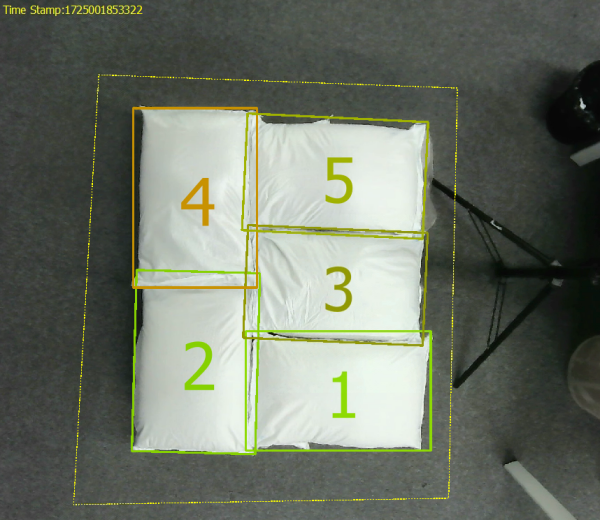
图|算法识别效果图
值得一提的是,洛微科技的软包拆垛解决方案还具备远距离、大视野、大景深的特点,最远工作距离可达5米,视野范围达到70°x50°,能够轻松覆盖各种常见垛型。同时,该方案节拍快、识别精准,视觉识别速度不超过2.5秒/件,大大提升了拆垛效率。此外,它还适配国内外主流机器人,如ABB、库卡、发那科等,并支持TCP/IP协议快速集成,可快速嵌入现有生产线,减少线路改造难度,助力企业提升生产效率。
这一创新方案不仅提升了拆垛效率,还降低了人力成本和人为错误,为企业带来了显著的经济效益。同时,它还为企业应对不同的生产和物流场景变化提供了有力的支持。未来,洛微科技将继续不断创新和突破,为更多行业提供高效、智能的解决方案。