具身智能作为人工智能从虚拟算法走向物理实体的核心范式,正快速完成从实验室研发到产业化落地的转型。伴随人形机器人、通用操作机器人进入规模化量产阶段,高精度真值数据已成为制约模型训练、算法迭代与工程化落地的核心瓶颈,而围绕真值数据采集的技术路线、硬件方案与基础设施建设,正成为行业竞争的关键赛道。
一、具身智能市场态势与数据采集基础设施建设
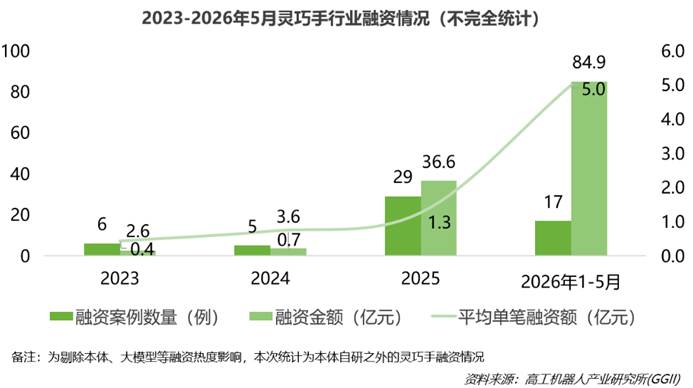
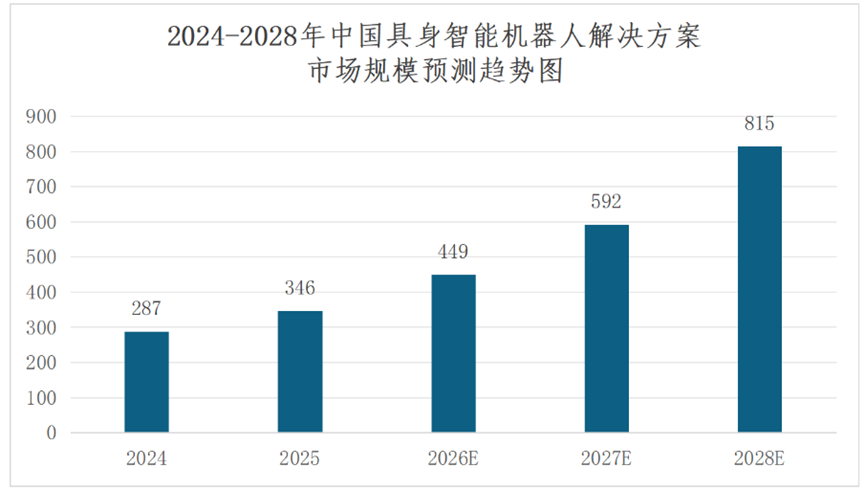
当前具身智能市场保持高速增长,商业化进程全面提速。根据中商产业研究院数据,2025年中国具身智能机器人解决方案市场规模已达346亿元,同比增长20.6%,预计2026年将升至449亿元,2028年有望突破815亿元。从全球视角看,高盛预测2035年全球人形机器人市场规模将达到1540亿美元,成为继智能手机、新能源汽车之后又一颠覆性产业。
伴随市场扩张,行业普遍进入数据驱动的发展阶段,商业化路径遵循“少量数据验证-大量数据深耕-海量数据闭环”的渐进式规律,数据规模与数据质量直接决定机器人的泛化能力与落地效率。
在此背景下,科技企业与地方政府纷纷加速布局数据采集基础设施:智元机器人与英伟达合作搭建GenieSim平台,形成真机遥操作与仿真数据结合的采集体系,成为全球大模型训练的重要数据供给方;深圳等产业集聚区启动标准化数据采集训练场建设,统一硬件、场景与评测标准,支撑垂直场景规模化数据生产;蚂蚁数科推出的AoE框架则通过轻量化第一人称视频采集,大幅降低数据获取成本,将机器人典型任务成功率从45%提升至95%。数据采集工厂的核心价值,正是以工业化方式稳定产出高可用、高精度的真值数据,破解行业“数据少、噪声大、成本高、难泛化”的底层难题。
二、当前主流真值数据采集技术路径
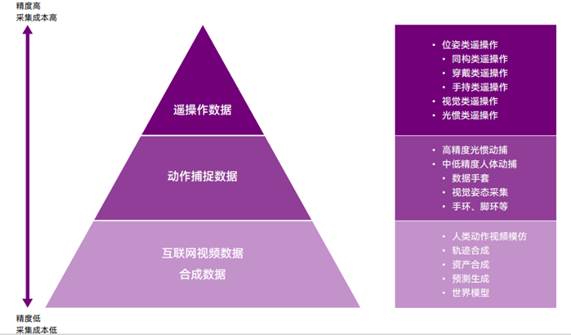
目前行业已形成真机采集与仿真生成并行的技术格局,不同路线各有适用场景与局限,共同构成真值数据获取的完整体系。
遥操作数据采集通过人工远程控制机器人,记录交互过程与传感器反馈,数据真实性高,适合精密装配、柔性抓取等复杂任务,但成本高、规模受限,且受操作者主观影响较大。光学动作捕捉通过红外或视觉手段获取人体或机械臂运动轨迹,采集效率高、成本可控,但缺少力触觉等关键信息,跨机器人本体迁移难度大。互联网视频采集依托公开视频资源提取行为与场景信息,数据体量极大、获取成本低,但存在视角偏差、目标遮挡、隐私风险与标注一致性问题。合成数据通过物理仿真环境生成交互样本,高效可控、可覆盖极端场景,但仿真环境与真实物理世界存在偏差,仍需真机数据校准。
无论何种技术路线,在实际落地中,最终都需要依赖硬件感知设备完成真值的量化输出。在具身智能机器人腕部操作、动态动作捕捉、近距离精细作业等核心场景,传统采集方式与硬件方案存在系统性短板,行业也在持续探索更适配的技术路线。
以单目、双目为代表的传统纯视觉方案,在机器人0.1–1m近距离作业区间精度明显不足,无法支撑抓取、装配等毫米级任务的真值标定;面对弱纹理平面、高反光金属、黑色吸光物体时,极易出现深度失效与点云空洞,实际工业场景覆盖率偏低,大量采集数据无法直接用于模型训练。在动态采集场景中,滚动快门带来的运动拖影、果冻效应会直接导致姿态与轨迹真值偏移。此外,多设备并行采集时信号易串扰,无法满足数据工厂高密度部署需求;常规传感器防护等级低、温漂明显,在粉尘、水溅、宽温变化的工业环境中容易出现标定漂移,长期稳定性不足。
相比之下,RGBD相机能够直接输出三维几何与姿态信息,在真值量化、动态跟踪、环境适应性上具备天然优势,是更贴合具身智能真值采集需求的硬件形态。但市面上普通RGBD产品仍存在精度、同步性、可靠性不足的问题,需要更专业化的方案来匹配工业级、规模化的数据工厂需求。
三、洛微科技DM系列iToF方案:面向真值采集的专业化硬件优化
针对具身智能真值采集的核心痛点,洛微科技推出DM系列与DM‑SE系列iToF RGBD深度相机,以全局快门iToF技术为核心,打造适配机器人腕部、动态动作捕捉与工业级部署的专用采集方案。
DM系列定位旗舰级应用,采用Sony IMX570深度传感器与面阵VCSEL光源,集成RGB、ToF与IMU多模态数据,支持56fps高速深度采集与6TOPS本地算力,满足高精度动态捕捉与复杂算法部署需求;DM‑SE系列为工业级紧凑款,在保留核心精度的基础上优化结构与成本,30fps深度帧率与1TOPS算力可覆盖大多数自动化场景,适合大规模批量部署。


在关键性能上,两款产品测距范围覆盖0.2–10m,兼顾近距离精细操作与中远距离环境感知,在0.1–1m核心作业区间精度可达±3mm,深度准确度≤0.25%×depth;采用全局快门RGB与高帧率深度采集,消除运动拖影与畸变,四模态硬件同步时间误差小于1ms,系统延时低于 10ms,可实现多模态数据精准对齐。环境适应性方面,产品采用多频调制抗干扰设计,可抵御强光与室内频闪干扰,支持多机并行无串扰采集,满足数据采集工厂高密度部署要求;IP67 工业防护与‑30℃~65℃宽温工作范围,可在粉尘、水溅、温差剧烈的环境下稳定运行,无冷凝、无标定漂移,对弱纹理、金属、黑色物体场景覆盖率超99%,点云空洞率低于2%,适配户外、工厂等复杂真实场景,能够稳定输出可直接用于模型训练的高质量真值数据。
四、未来展望
随着具身智能向通用化、场景化、规模化持续迈进,真值数据采集将逐步完成从“人工零散获取”到“自动化工厂生产”的转型。未来,多技术路线深度融合、硬件感知能力持续升级、数据全流程标准化治理将成为核心趋势,高精度、低时延、强鲁棒性的三维感知硬件将进一步普及,推动真值数据在采集效率、质量与成本上实现全面突破。伴随着数据闭环不断完善与行业标准逐步统一,真值数据体系将为具身智能机器人在工业制造、商业服务、家庭生活等更多场景稳定落地提供坚实底座,加速物理世界智能普惠的到来。