



在自动驾驶感知技术领域,激光雷达作为核心传感器之一,正经历从传统ToF方案向更先进技术形态的迭代。FMCW(Frequency Modulated Continuous Wave,调频连续波)激光雷达凭借其独特的相干检测原理,在测距精度、测速能力、抗干扰性等关键性能上实现了质的飞跃,被业内公认为车载激光雷达的终极形态。本文将从技术原理、核心优势、关键技术及产业布局等维度,深度解析FMCW激光雷达的技术内核与发展前景。
一、技术原理:相干检测的底层逻辑
激光雷达的测量方式主要分为直接飞行时间(dToF)和间接飞行时间(iToF)两类,FMCW 激光雷达是iToF技术中最成熟且应用最广泛的实现形式。其核心原理与毫米波雷达类似,通过频率调制与相干检测实现距离和速度的同步测量,但在测角原理上存在本质差异。
1.1 核心测量机制
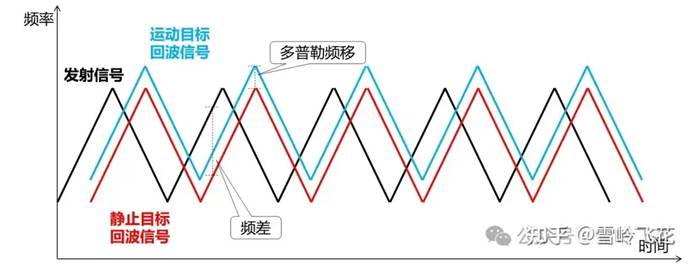
FMCW 激光雷达通过激光器发射频率随时间线性变化的连续激光信号,该信号经目标反射后形成回波,与本地保留的本振光信号在探测器中发生相干混频,产生拍频信号。通过分析拍频信号的频率差,可计算出目标的距离信息;同时利用多普勒频移效应,直接提取目标的径向速度数据。这种“一次探测双参数获取”的特性,使其无需像ToF激光雷达那样通过多帧点云匹配推算速度,大幅提升了动态目标的感知效率。
1.2 与 ToF 技术的本质区别
ToF激光雷达依赖测量激光脉冲的飞行时间差计算距离,速度信息需通过多帧点云的位置变化间接推导,存在延迟大、精度低的问题。而 FMCW 激光雷达的相干检测机制,使其在每个点云数据中天然包含距离和速度双维度信息,单帧即可完成动态目标的精准识别。此外,ToF 技术采用脉冲激光,峰值功率高但平均功率低,而 FMCW 采用连续波调制,峰值功率和平均功率均处于较低水平,在人眼安全与设备兼容性上更具优势。
1.3 测角原理的技术特性
FMCW激光雷达凭借极窄的激光波束,可通过扫描器件的角度直接计算目标方位,无需复杂算法辅助。相比之下,毫米波雷达因波束较宽,需依赖 DOA(Direction of Arrival)算法估计目标角度,测角精度和实时性均存在差距。这种技术特性使得 FMCW 激光雷达能够同时兼顾距离、速度、角度三维度的高精度测量,形成完整的 4D 感知能力。
二、核心技术优势:超越传统方案的性能升级
基于独特的技术原理,FMCW激光雷达在多项关键性能指标上全面超越传统ToF激光雷达,尤其适配自动驾驶的复杂应用场景。

2.1 距离与速度测量的双重突破
在测距性能上,FMCW激光雷达的探测距离可达300-500m,且测距精度更高,能够精准识别远距离小目标;而ToF 激光雷达的典型探测距离为 150-250m,在远距离场景下性能衰减明显。在测速方面,FMCW的直接测速机制使延迟控制在微秒级,测速精度可达0.1m/s,远优于ToF激光雷达 5-6 帧的推算延迟和米级测速误差。这种性能优势在 "开门杀"、"鬼探头" 等突发场景中尤为关键,可大幅缩短自动驾驶系统的反应时间。
2.2 抗干扰能力的质的飞跃
ToF 激光雷达采用非相干检测,难以区分自身发射的激光回波与环境光、其他雷达的干扰信号,在多雷达并行工作或强光照射场景下易出现误检。FMCW 激光雷达通过窄线宽激光(通常在100kHz以下)和相干检测技术,仅对特定频率区间的回波信号进行混频处理,可有效过滤环境光和其他雷达的干扰。即使在阳光直射等极端条件下,仍能保持稳定的目标检测能力,抗干扰性能提升3-4个数量级。
2.3 低功率与高安全性的平衡
ToF 激光雷达的测距性能依赖峰值功率,1550nm 波段的产品峰值功率常高达 1000W 以上,虽满足人眼安全标准,但可能对相机 CMOS 芯片等光学设备造成损伤。FMCW 激光雷达的信噪比主要由调频线性度和激光线宽决定,与功率相关性较低,其峰值功率通常在 100mW 以下,平均功率仅为 ToF 产品的十分之一,在保障人眼安全的同时,避免了对周边设备的潜在损害,安全裕量显著提升。
2.4 高动态范围与恶劣环境适应性
ToF激光雷达采用SiPM或SPAD等单光子探测器,动态范围有限,在面对高反射目标时易出现 "Blooming"(光晕扩散)现象,导致目标轮廓失真。FMCW 激光雷达采用 PIN 探测器,动态范围更广,可清晰区分高反目标与低反目标,避免了高反膨胀问题。同时,相干检测技术使其在雨雪、雾霾等恶劣天气条件下的穿透能力更强,相比ToF激光雷达的性能衰减,FMCW 产品仍能保持稳定的探测效果,环境适应性更优。
2.5 固态化潜力与降本空间
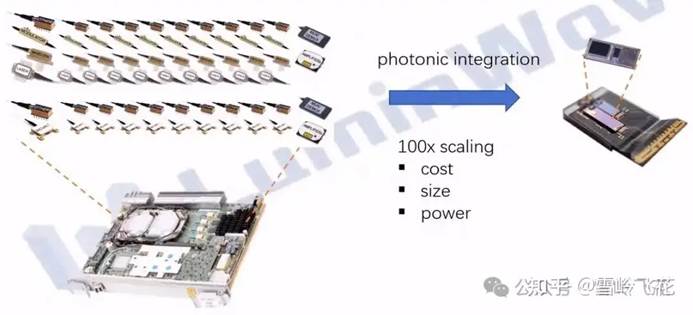
ToF 激光雷达的光学部件与扫描模块难以实现芯片化,限制了其小型化和低成本量产的可能性。FMCW 激光雷达可通过硅光集成技术,将激光器、探测器、扫描模块等核心部件集成于硅基芯片中,实现真正的 "芯片化" 全固态设计。硅光集成技术的规模化应用,可大幅降低激光雷达的体积、重量和成本,为车载场景的大规模普及提供了技术基础。
三、关键技术体系:实现高性能的核心支撑
FMCW 激光雷达的性能表现依赖于多项核心技术的协同突破,其中调频激光器、扫描系统、相干接收、硅光集成及信号处理算法构成了其技术体系的核心。
3.1 调频激光器:性能瓶颈的关键突破
调频激光器是FMCW激光雷达的核心器件,其性能直接决定雷达的测距分辨率、探测距离和稳定性。高性能调频激光器需满足四项关键指标:一是较大的频率可调范围,决定拍频信号的最大频率和测距分辨率(测距分辨率ΔR与调频带宽 B 满足 ΔR=c/(2B));二是较快的调频速率,影响雷达的动态响应特性;三是极窄的线宽,线宽越窄,相干长度越长,信噪比和探测性能越优;四是高线性度的调频特性,避免因调频非线性导致的距离计算误差。
目前主流的调频激光器包括 DFB(分布式反馈)激光器、DBR(分布式布拉格反射)激光器和外调激光器。DFB 激光器具有优秀的调频线性度和量产潜力,静态线宽典型值为 0.6-5MHz,是当前车载 FMCW 产品的主流选择;外调激光器虽在線性度、线宽等指标上表现更优(线宽可达 1kHz 左右),但成本较高,暂未大规模应用;DBR 激光器则在功率稳定性上具有优势,但线宽动态展宽较差,方案复杂度较高。
3.2 扫描系统:固态化的技术路径
FMCW 激光雷达的扫描方式主要分为 MEMS 振镜和纯固态扫描两类,其中纯固态方案因无运动部件,可靠性更高,是未来的发展方向。纯固态扫描技术主要包括三种实现形式:
- 光学相控阵(OPA):通过移相器控制阵列天线的相位差,实现激光波束的电子扫描,具有分辨率高、角度灵活性强等优势,是最具潜力的固态扫描方案。但其存在旁瓣干扰和天线数量多导致的系统复杂等问题,需通过算法优化和芯片设计改进加以解决。
- 焦平面阵列(Focal Plane Array):以不同像素作为发光源,实现多角度扫描,方案实现简单,但分光损耗较大,探测距离受限,扫描角度固定。
- 波长色散(Wavelength Dispersion):通过棱镜将不同波长的激光进行色散,实现角度扫描,同样具有结构简单的优势,但需搭配宽谱激光器,技术难度较大,扫描角度有限。
3.3 相干接收与信号处理:微弱信号的精准解析
FMCW 激光雷达的接收系统采用平衡光电探测器构建相干接收器,需配合低噪声光信号处理(OSP)电路,实现微弱回波信号的精准检测。由于回波信号经长距离传输后强度较弱,相干接收技术通过本振光与回波光的混频放大,可显著提升信号检测的灵敏度,使信噪比相比 ToF 技术提升3-4个数量级。
在信号处理方面,FMCW 激光雷达对 ADC 转换速率的要求是 ToF 产品的2-4倍,需通过超高速 FFT 转换实现拍频信号的频率解析。专用数字信号处理 ASIC 芯片的开发,是实现实时信号处理、提升系统响应速度的关键,其算法优化直接影响距离和速度测量的精度与稳定性。
3.4 硅光集成技术:规模化量产的核心保障
硅光集成技术是 FMCW 激光雷达实现小型化、低成本量产的核心支撑,其本质是采用 CMOS 兼容工艺,将光学器件与电子器件集成于硅基芯片中,形成功能完整的集成光子芯片。通过硅光集成,可将激光器、调制器、放大器、光学天线等核心部件集成于单一芯片,实现 "LiDAR-on-a-Chip" 的设计目标。
硅光集成技术的优势在于:一是高集成度,大幅缩小激光雷达的体积和重量;二是低成本量产,依托成熟的 CMOS 工艺,可实现大规模生产,降低单位成本;三是高可靠性,减少了器件间的连接环节,提升了系统的稳定性和抗振动能力。目前,硅光集成芯片的关键技术难点在于 III-V 族材料与硅基芯片的异质集成,以及光器件与电器件的协同优化。
四、产业布局与技术趋势:国内外企业的研发探索
当前,FMCW 激光雷达已成为车载传感器领域的研发热点,国内外企业纷纷布局相关技术与产品,形成了多元化的产业竞争格局。
4.1 国外技术领先企业的布局
国外企业在 FMCW 激光雷达领域起步较早,凭借在硅光技术、激光器研发等方面的积累,占据了技术领先地位。Aeva 作为行业标杆企业,率先实现了基于硅光芯片的 FMCW 激光雷达量产,其第四代硅光模组将发射端、光学系统、探测端等核心部件集成于硬币大小的芯片上,产品探测距离可达 500m,角分辨率 0.025°×0.025°。Mobileye 依托英特尔的硅光技术优势,开发了多通道 FMCW 激光雷达处理器 SoC,点云密度达 600pt/deg²,量产目标价格低于 1000 美元。此外,SiLC、Insight 等企业在长距离探测、高分辨率扫描等细分领域也取得了显著进展,推动了 FMCW 技术的产业化落地。
4.2 国内企业的技术突破与创新
国内企业在 FMCW 激光雷达领域的研发虽起步较晚,但凭借在硅光集成、信号处理等领域的技术积累,已实现多项关键突破。洛微科技(LuminWave)依托硅光芯片技术,自主研发了F系列FMCW激光雷达,基于相干探测原理,具备完全阳光免疫能力,在正午强光直射下仍能保持稳定点云输出;同时能够穿透烟雾和尘土,即便在雨雾等恶劣天气中,也能维持较高的测距与测速精度,满足新国标对复杂环境的全天候感知要求。目前,洛微车载FMCW激光雷达已切入国内头部商用重卡L2+辅助驾驶量产项目,逐步从“实验室创新技术”迈向“前装量产”。
4.3 未来技术发展趋势
FMCW 激光雷达的未来发展将聚焦于三个核心方向:一是核心部件的性能升级,包括更窄线宽、更高线性度的调频激光器,更高集成度的硅光芯片,以及更低噪声的相干接收系统;二是成本控制与量产能力提升,通过硅光集成技术的规模化应用,推动产品成本降至车载场景可接受的水平;三是功能安全与车规适配,满足 ISO 26262 功能安全标准和 ISO 21434 cybersecurity 标准,实现与自动驾驶系统的深度融合。
五、结语
FMCW 激光雷达通过相干检测原理,在距离、速度、角度测量的精度与实时性上实现了对传统 ToF 技术的超越,其抗干扰性、低功率特性和固态化潜力,完美契合了自动驾驶对传感器的严苛要求。随着调频激光器、硅光集成、信号处理等核心技术的持续突破,FMCW 激光雷达的成本将逐步降低,量产规模不断扩大,有望成为车载感知领域的主流方案。 在技术创新的浪潮中,国内外企业的持续研发与探索,将推动 FMCW 激光雷达的性能不断升级,为自动驾驶的安全落地提供更可靠的感知支撑。未来,随着硅光集成技术的进一步成熟和产业生态的完善,FMCW 激光雷达将不仅局限于车载场景,还将在工业自动化、机器人、消费电子等领域实现广泛应用,开启多维度感知的新时代。
参考文章:https://blog.csdn.net/tian362/article/details/138177527