| 参数 |

|
| 尺寸(L x W x H) | 164mm x 80.41mm x 60mm |
| 重量 | 775±5g |
| 探测距离 | 0.3m~17m @10%NIST |
| 视场角(H x V) | 107° x 77° |
| 角分辨率(H x V) | 0.33° x 0.66° |
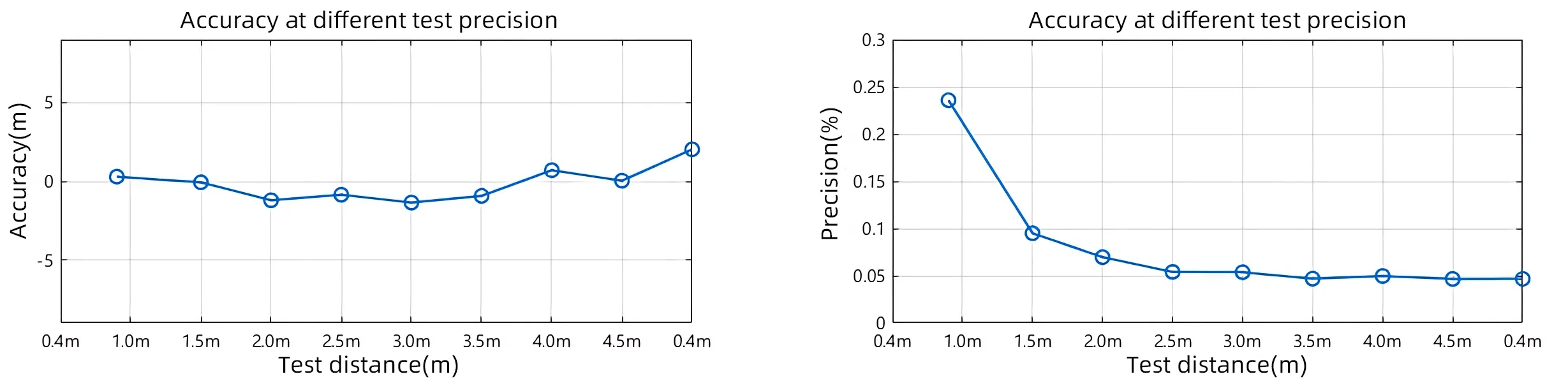
| 探测精度 | ≤1% |
| 探测盲区 | ≤0.3m |
| 工作电压 | 9 ~15 V |
| 产品功耗 | ≤0.3m |
| 探测盲区 | 典型电压下,标准功耗6W,最大功耗12W |
| 通信接口 | 100M Base-T 以太网接口(航空接头) |
| 帧率 | 1~10 Hz |
| 工作光强 | ≤100 KLux(非太阳直射) |
| 工作温度 | -40 - 75℃ |
| 存储温度 | -40 - 85℃ |
| SDK | Ubuntu x64 / ARM |
| 可靠性 | GB/T 28046.3-2011 4.1.2.7 |
| 防护等级 | IP54 |
| 人眼安全 | Class 1 |