| 参数 |

 |
|
| 工作原理 | TOF (Time-of-flight) 深度相机 | |
| 芯片平台 | Sigmastar9211 | |
| 激光器 | 850nm VCSEL*2 | |
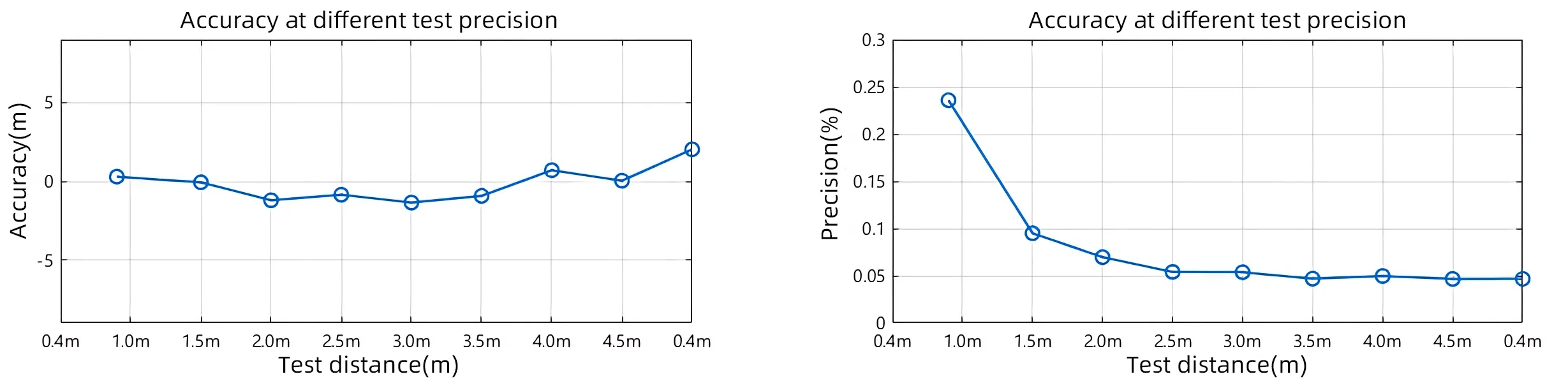
| 探测距离 | 0.05m~2.5m | |
| 测距精度 | 0.05~0.4m ≤2cm,0.4~2.5m<1% | |
| 视场角 (H x V) | 120° x 56° | |
| 分辨率 | 224 x 109 pixel | |
| 帧率 | 10 fps | |
| 人眼安全 | Class 1 | |
| 功能 | HDR功能 | 支持HDR功能 |
| 曝光时间 | 支持曝光时间调整 | |
| 滤波器 | 支持多种滤波器设置 | |
| 输出文件类型 | 深度图、IR图、点云 | |
| 功耗 | 1.4W | |
| 网络接口 | USB 2.0 | |
| 电源接口 | USB 2.0 | |
| 物理 | 尺寸( LxWxH ) | 44mm x 25mm x 21.4mm |
| UVC协议 | 支持 | |
| 操作系统 | Windows x86/x64, Linux Ubuntu 14.04/16.04 | |